This clutch device enables low-power, rapid, and reversible actuation of soft robotic devices to improve physical human-robot interactions
Background
Common implementations of soft robotics and compliant mechanisms utilize deformable materials, such as silicone or other elastomers, in their designs. Flexibility and elasticity improve overall compliance, but constructing robots from these materials often limits the overall strength and speed of a robot. This smart material clutch enables several control strategies, improving physical human robot interactions through variable stiffness joints in actuated linkages, variable grip strength, and conformal grasping.
Technology Description
This technology is a compact, low-power and partially 3D-printed magnetorheological fluid clutch that operates by variably and reversibly altering the shear stress of the fluid through the local activation of an array of electropermanent magnets (EPMs). By toggling the magnetization of each EPM independently on the order of a few milliseconds, we allow for rapid response times and variable torque transmission without further power input. Selectively polarizing the EPMs for different lengths of time results in repeatable and variable magnetic flux, in turn enabling further control precision. We present the design, modeling, and measured performance of this clutch with various control strategies and demonstrate its utility as a low-power alternative to more traditional clutch designs.
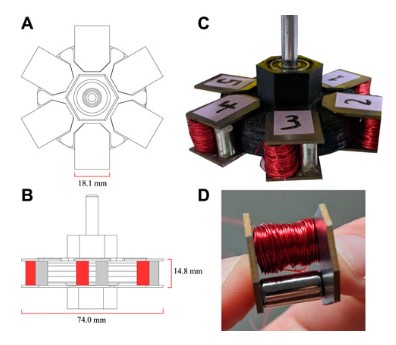
An assembled MRF Clutch with six EPMs. (A) Top-view and (B) Side-view. The coils are not depicted in the 3D rendering, but their locations are highlighted in red, while the NdFeB magnet is shown in gray. (C) A photo of the final MEC, shown from the isometric view (D) A single EPM, viewed head-on to see the two magnets and coil.
Features & Benefits
- Low power
- Independent magnet operation enables wide variety of control strategies
- Rapid response times
Applications
- Soft robotic actuators
- Prosthetics
- Soft grippers
Opportunity
Oregon State University is seeking development and commercialization partners.
Status
Patent pending